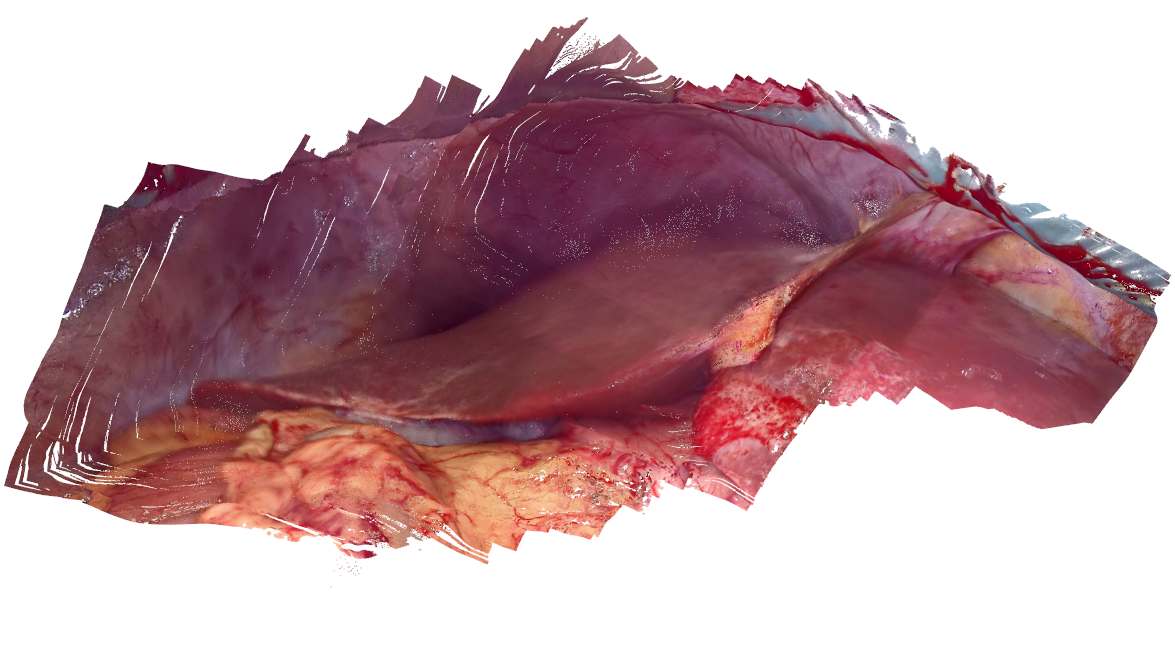
3D Liver Reconstruction
Intraoperative liver reconstruction from stereo laparoscopy images using non-rigid SLAM algorithms.

Image-guided Pheochromocytoma Resection
PET-CT guided resection of pheochromocytoma using an intraoperative navigation system.

PCNL Access
Optimization algorithm result to evaluate the optimal access to kidney stones using concentric tube robots.
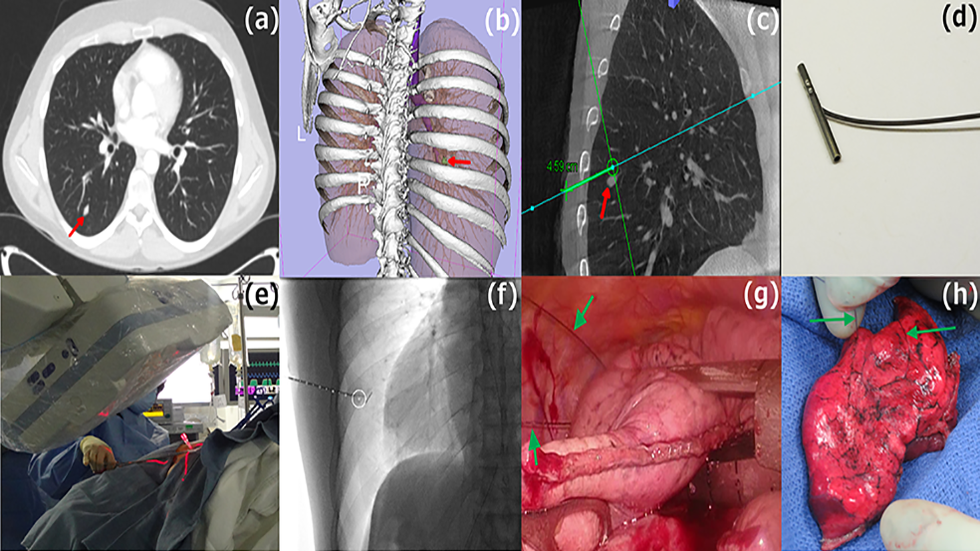
Image-guided video-assisted thoracoscopic surgery (iVATS)
Localization of lung nodules using passive fiducials placed under C-arm CT guidance.

Active Catheter for Angioplasty
Steerable catheter with SMA actuators and strain gauges for robot-assisted angioplasty.

Mixed-Supervised Dual-Network Segmentation
Deep learning based detection and segmentation of the kidneys on CT images.
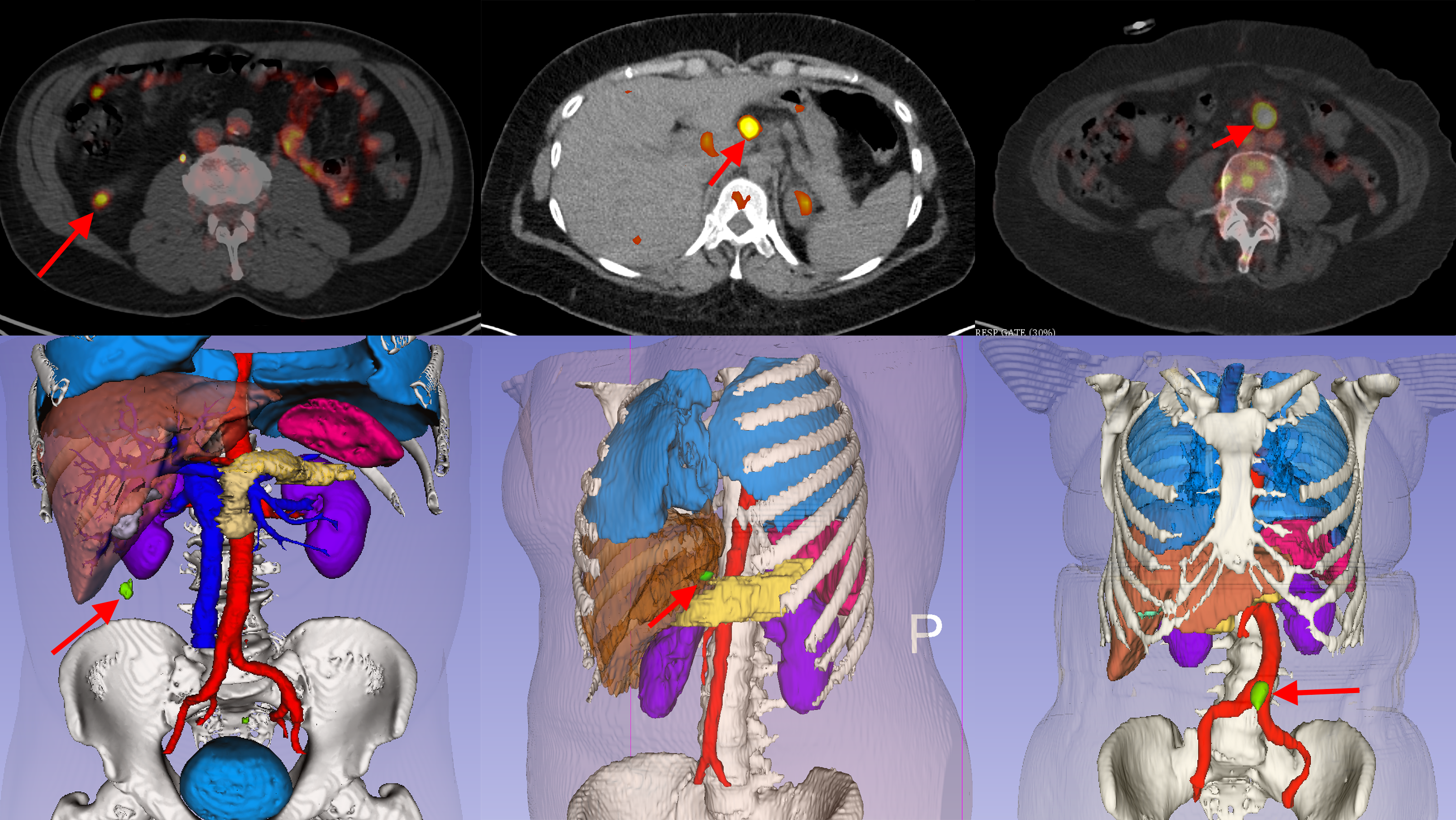
Image-guided Lymphadenectomy
Localization and resection of PET-avid lymph nodes within the abdomen using an intraoperative navigation system.

Robotic Manipulator for Catheter Insertion
Robotic manipulator to guide catheter insertion for cardiac ablation.

Deep-learning Based Multimodal Image Registration
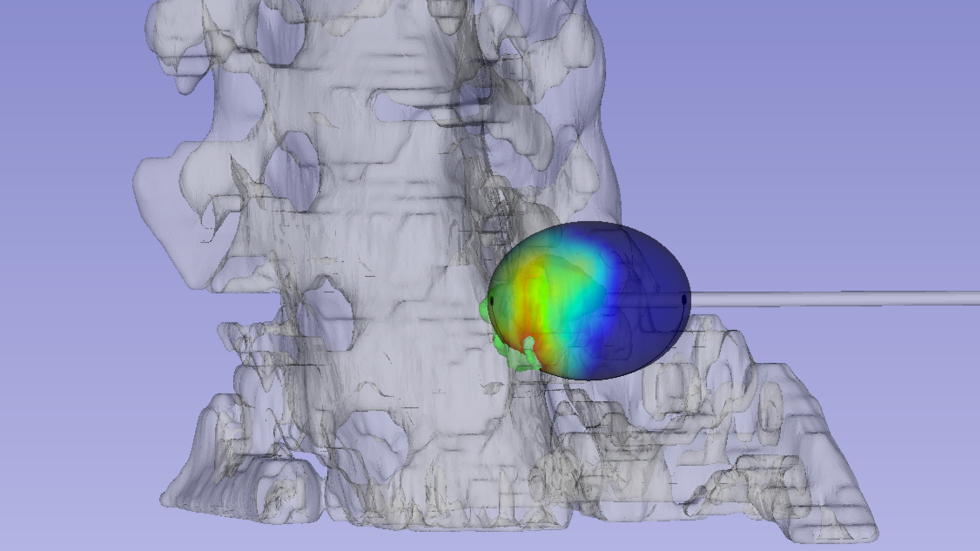
MR-guided Cryotherapy
Visualization of the simulated cryo iceball and the tumor. Red represents areas of insufficient ice ball coverage.
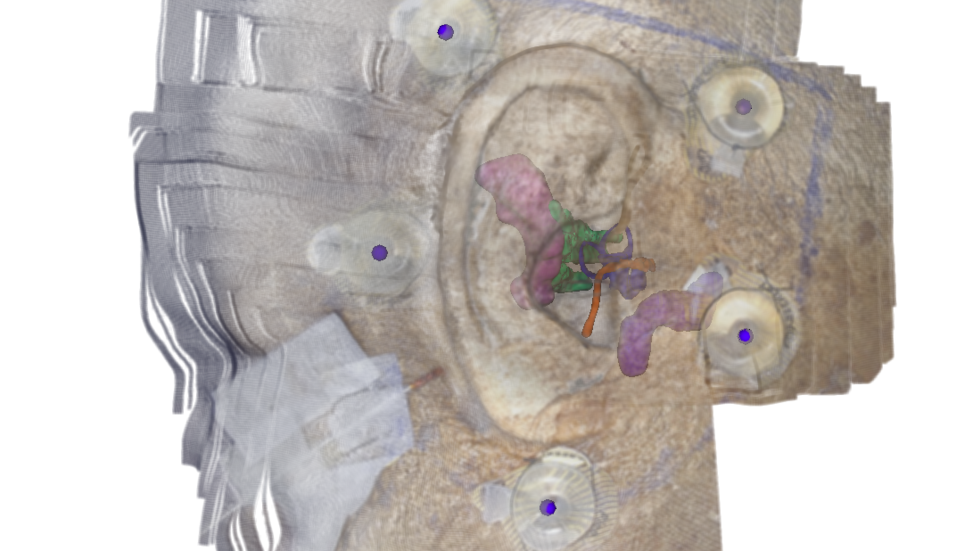
Surface Reconstruction of the Inner Ear
Surface reconstruction of the ear overlaid with the inner ear structures segmented from CT images.
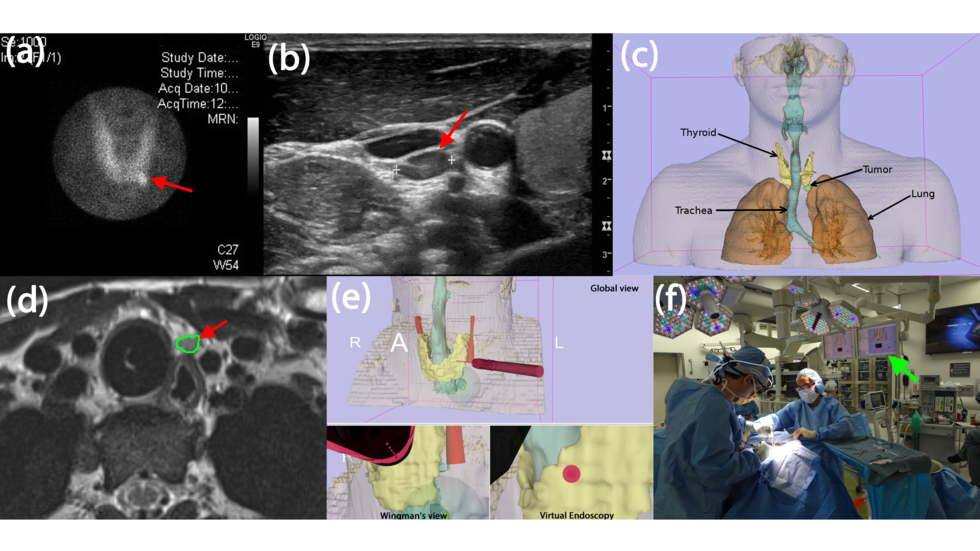
Image-guided Parathyroidectomy
Image-guided parathyroidectomy using intraoperative MRI and a surgical navigation system.
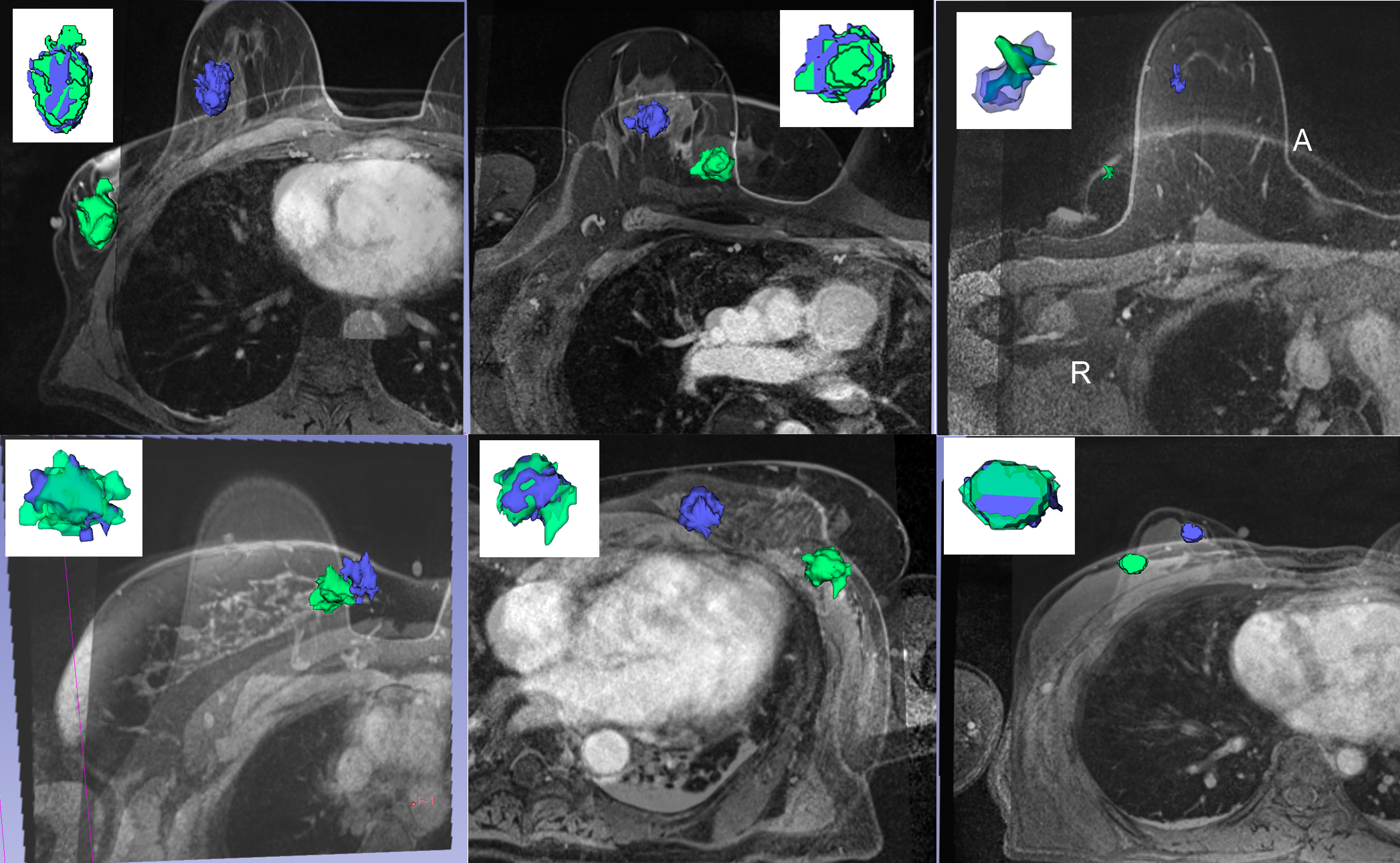
Breast Deformation during Breast Conserving Surgery
Supine and prone MRI registered to quantify the tumor deformation from diagnostic imaging to surgery.